작가:
Christy White
창조 날짜:
4 할 수있다 2021
업데이트 날짜:
15 할 수있다 2024

콘텐츠
Lego Mindstorm NXT 로봇은 훌륭한 장난감이며 프로그래밍 방법을 배우는 훨씬 더 좋은 방법입니다. 로봇과 함께 제공되는 프로그램은 사용이 간단하고 직관적이며, 로봇이 무엇이든 할 수 있도록 만들 수 있습니다. 레고 조각을 사용하여 로봇을 만든 후에는 작업 또는 작업 조합을 수행하도록 프로그래밍 할 때입니다. 배우려면 계속 읽으십시오.
단계
5 단계 중 1 부 : 시작하기
프로그램을 설치하고 엽니 다. 로봇에는 Mac 및 Windows 용 프로그램이 모두 포함되어 있거나 Lego Mindstorm 웹 사이트에서 다운로드 할 수 있습니다. 디스크를 삽입하거나 다운로드를 열면 설치 창이 나타납니다. 지침에 따라 프로그램을 설치 한 다음 엽니 다.
프로그램을 탐색하는 방법을 알아보십시오. 상단의 도구 모음을 사용하여 프로그램을 저장하거나 기존 프로그램을 열거 나 새 프로그램을 만듭니다. 검은 색 화살표 모양의 "포인터"도구를 사용하여 작업을 삽입, 이동 및 삭제합니다. 작은 흰색 손 모양의 "이동"도구를 사용하면 프로그램 창을 창 내부로 끌어서 탐색 할 수 있습니다. 말풍선 모양의 주석 도구를 사용하면 프로그램의 일부에 텍스트를 입력 할 수 있으므로 주석을 추가하여 다른 사람이 프로그램을 이해하도록 도울 수 있습니다.- 창 오른쪽에있는 Robo Center에는 빌드하고 프로그래밍 할 수있는 여러 로봇의 자습서 및 지침이 포함되어 있습니다. Robo Center 상단에있는 다른 탭은 프로그래밍에 도움이되는 온라인 리소스에 액세스 할 수있는 포털을 엽니 다.
- 작업 위에 마우스를 놓으면 오른쪽 하단 모서리에서이 작업에 대한 설명을 열고 창 하단에서 해당 작업에 대한 설정을 변경합니다.
다양한 작업에 액세스하는 방법을 알아 봅니다. 왼쪽의 작업 표시 줄에는 로봇이 수행 할 수있는 모든 작업이 포함되어 있습니다. 막대 하단에있는 세 개의 탭을 통해 이러한 작업의 다른 집합에 액세스 할 수 있습니다. 로봇이 가질 수있는 다양한 작업을 발견하고 경험하려면 그것을 탐색하십시오.- 녹색 원이있는 맨 왼쪽 탭에는 이동 (모션), 사운드 (사운드), 루프 (반복) 및 전환과 같은 가장 일반적인 작업이 포함되어 있습니다. 이 레이아웃을 사용하면 가장 많이 사용하는 작업에 빠르게 액세스 할 수 있지만 나머지 작업에는 액세스 할 수 없습니다.
- 세 가지 색상의 정사각형이있는 가운데 탭에는 범주로 구분 된 포함 된 모든 작업이 포함되어 있습니다. 마우스를 상단의 녹색 원 위에 놓으면 사운드 재생, 컬러 조명 활성화와 같은 일반적인 작업 및 작업에 액세스 할 수 있습니다. 모든 작업을 찾으려면 다른 버튼을 탐색하십시오.
- 등호가있는 마지막 탭에는 인터넷에서 만들거나 다운로드 한 사용자 지정 작업이 있습니다.
튜토리얼로 시작하십시오. 이 프로그램에는 첫 번째 프로그램을 안내하는 몇 가지 자습서가 포함되어 있습니다. 오른쪽의 로보 센터로 이동하여 생성하려는 프로그램 카테고리를 클릭하십시오. 첫 번째 프로그램의 경우 차량에서 Shooterbot으로 시작하는 것이 좋습니다. 이 자습서는 간단하지만 사용 가능한 기본 컨트롤과 일반적인 코딩 및 테스트 방법을 소개합니다.
자습서의 지침에 따라 작업을 프로그램으로 끕니다. 필요에 따라 설정을 변경하여 각 작업이 원하는 작업을 정확히 수행하도록합니다. 프로그램을 통과하는 전류로 연결된 순서대로 배치하여 다양한 작업에 참여하십시오. 루프 안에 작업을 넣거나 해당 제어 문에 이러한 작업을 포함하도록 전환합니다.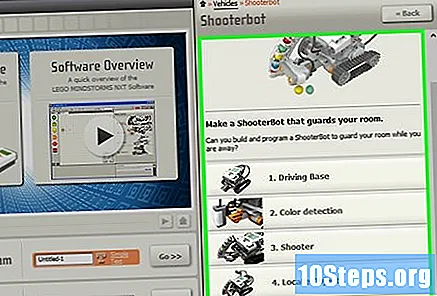
프로그램이 끝나면 로봇의 지능형 브릭에 다운로드하세요. USB 케이블을 사용하여 브릭을 컴퓨터에 연결합니다. 프로그램 창의 오른쪽 하단에있는 사각형 버튼을 사용하면 연결된 NXT 장치와 통신 할 수 있습니다. 이 버튼의 왼쪽 하단은 프로그램을 장치로 다운로드합니다. 다운로드가 완료되면 지능형 브릭을 분리하고 로봇에 삽입 한 다음 프로그램을 시작하여 실행되는지 확인합니다.
5 단계 중 2 단계 : 로봇 제어
이동 작업으로 로봇을 이동합니다. 이 작업에는 두 개의 기어가 있습니다. 프로그램에 추가하고 설정을 조정하십시오. 타이어에 연결된 문을 사용하여 로봇을 움직입니다. 휠을 포트 B와 C에 연결 한 경우 이동 작업이 포트 B와 C에 대해 구성되어 있는지 확인하십시오.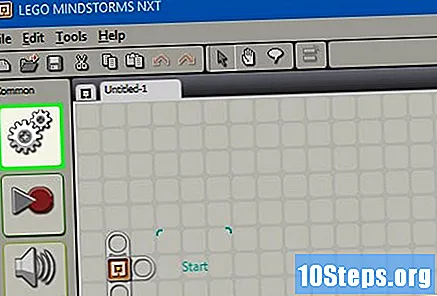
- 방향을 정의하여 전진, 후진 또는 완전히 멈 춥니 다. 스티어링 컨트롤을 사용하여 돌립니다.
- 특정 회전 수, 특정 시간 또는 각도만큼 앞으로 이동합니다. 또는 기간을 "무제한"으로 설정하여 나중에 프로그램에서 중지하라는 명령을받을 때까지 로봇이 앞으로 이동하도록합니다.
엔진 명령을 사용한 촬영과 같은 다른 작업을 수행합니다. Shooterbot 튜토리얼에서 저격수는 포트 A에 연결됩니다.이를 제어하려면 포트 A를 활성화하는 모터 작동 (단일 기어로 표시)을 사용합니다. 방향을 정의하여이 모터의 정확한 작동을 제어하도록 설정을 조정합니다 (앞으로 ( 앞으로), 뒤로 또는 중지됨 (parad)), 동작, 힘 수준 및 운동 지속 시간.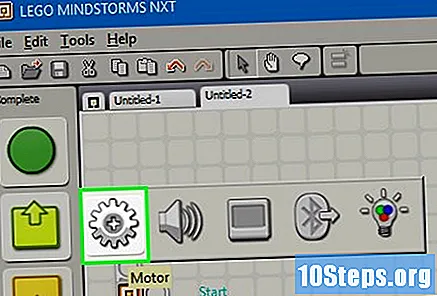
- "Wait for Completion"을 선택 해제하면 로봇이 모터 작동으로 제어되는 이동을 완료하기 전에 프로그램에서 다음 명령을 실행하기 시작할 수 있습니다. 예를 들어 로봇이 걷다가 동시에 쏠 수 있습니다.
- 모터 명령은 제어하는 모터가 수행하는 모든 작업을 수행합니다. 엔진이 쟁반을 들어올 리거나, 공을 던지거나, 로봇을 돌리거나, 원하는 모든 것을 할 수 있도록 로봇을 만드십시오. 이 명령은 로봇의 성능에 창의성과 유연성을 제공합니다. 그것을 활용하십시오.
센서를 사용하여 로봇이 환경과 상호 작용할 수 있도록합니다. 초음파, 터치 및 컬러 센서를 스마트 칩 포트에 배치하고이를 사용하여 빛, 색상, 소리 및 터치를 느껴보세요. 로봇은 또한 시간을 추적하고 회전을 알 수 있습니다. 이러한 센서를 사용하면 프로그램이 활성화 된 경우에만 조치를 취할 수 있습니다. 예를 들어, 빨간색을 만날 때 "빨간색"이라고 말하는 프로그램을 가질 수 있지만 파란색을 만날 때는 그렇지 않습니다.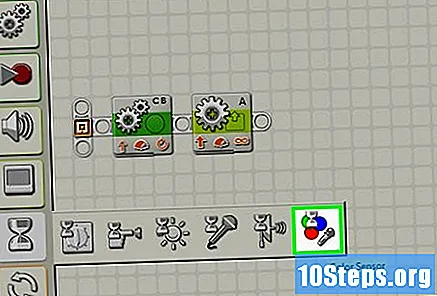
작동 동작을 사용하여 로봇이 작업을 수행하도록합니다. 여기에는 컬러 조명 켜기 / 끄기, 파일에서 소리 재생, 지능형 브릭 화면에 이미지 또는 텍스트 표시, Bluetooth를 통한 메시지 전송 등이 포함됩니다.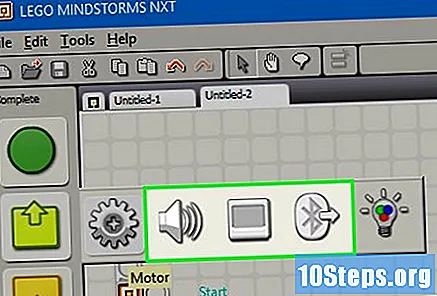
5 단계 중 3 : 루프 및 스위치 사용
루프 작동 방식을 이해합니다. 특정 조건이 참인 한 또는 특정 동작이 발생할 때까지 일련의 명령을 반복적으로, 무기한으로 또는 지정된 횟수 동안 수행 할 수 있습니다.
- 예를 들어 로봇이 노란색 공을 찾을 때까지 여러 개의 공을 검사하도록하려면 색상 센서로 제어되는 루프를 만듭니다. 루프 내의 작업은 다음 케이크를 검사 할 책임이 있습니다. 루프의 제어는 컬러 센서가 노란색을 감지하지 않는 것입니다. 따라서 컬러 센서가 공을 검사 한 후 노란색을 감지하면 새 공 검사를 중지하고 프로그램의 다음 부분으로 진행합니다.
스위치 작동 방식을 이해합니다. 스위치는 특정 조건이 참인 경우 일련의 명령을 수행하고 참이 아닌 경우 다른 일련의 작업을 수행하도록 로봇에 지시합니다. 이 두 가지 일련의 동작은 스위치에서 상호 배타적입니다. 로봇은 하나를 수행하지만 다른 작업은 수행하지 않습니다.
- 조치를 취하기 전에 한 스위치를 다른 스위치 안에 중첩하여 다른 조건을 확인하십시오. 예를 들어, 빛이나 소리를 감지하지 못하는 경우 중첩 스위치를 사용하여 로봇을 앞으로 움직입니다. 첫 번째 스위치는 빛을 찾습니다. 아무것도 감지되지 않으면 로봇은 소리를 찾는 두 번째 스위치로 들어갑니다. 소리를 감지하지 못하는 경우 (빛을 감지하지 못한 후)에만 로봇이 전진합니다.
- 값 제어 스위치에 둘 이상의 케이스를 포함하려면 스위치 설정에서 "평면보기"옵션을 선택 취소하고 조건이 나열된 설정의 오른쪽에서 "+"를 눌러 다른 케이스를 추가하십시오. 이것은 두 개 이상의 다른 값을 가질 수있는 숫자 또는 문자 메시지를 제어 할 때 유용합니다.
루프 또는 스위치를 프로그램에 드롭하고 컨트롤을 선택하십시오. 이것은 로봇이 스위치 또는 루프 내부에서 명령을 내리기 전에 찾을 조건을 정의합니다. 컨트롤은 일반적으로 센서입니다. 이를 통해 로봇은 환경에 더 가깝게 상호 작용할 수 있습니다.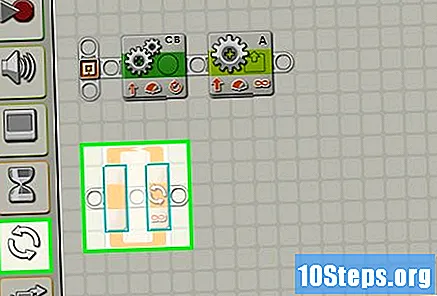
- 스위치는 값으로 제어 할 수도 있습니다. 데이터 케이블을 사용하여 스위치의 대상 필드에 변수를 추가하십시오. 숫자 또는 텍스트의 다양한 값에 대한 사례를 추가하십시오. 예를 들어, 로봇은 변수 번호가 0 인 경우 일련의 명령을 실행하고 1 인 경우 다른 명령을 실행하고 다른 숫자 인 경우 다른 명령을 실행할 수 있습니다.
- 루프는 시간에 의해 제어 될 수도 있습니다. 루프 내의 명령문은 지정된 시간 동안 실행되거나 카운트됩니다. 로봇이 이러한 작업을 무기한 수행 할 수 있도록 특정 조건이 참, 거짓 또는 영구가 될 때까지 루프를 실행하려면 로직을 선택하십시오.
다른 명령을 루프 또는 스위치로 드래그하십시오. 루프 안에 넣은 모든 작업은 루프가 실행될 때마다 수행됩니다. 케이스의 조건이 충족되면 스위치의 각 케이스에 배치하는 작업이 수행됩니다. 이러한 작업을 평소와 같이 배치하고 구성합니다.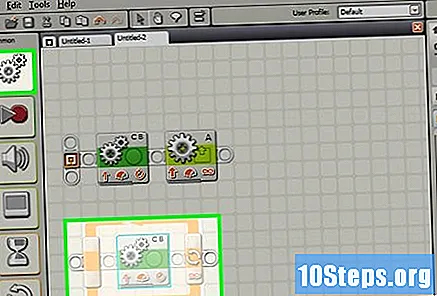
- 원하는 경우 다른 루프 및 스위치 내에 루프와 스위치를 포함 할 수 있습니다.
5 단계 중 4 부 : 변수 사용
변수 사용을 이해합니다. 변수는 정보를 저장할 수 있으므로 나중에 프로그램에서 액세스 할 수 있습니다. 특정 정보를 넣는 상자로 생각하십시오. 그런 다음 상자 (변수) 자체를 변경하지 않고이 정보를 제거하거나 변경할 수 있습니다.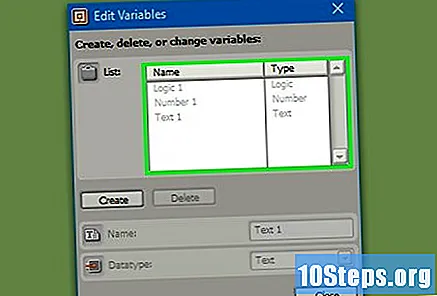
- 각 변수는 숫자, 텍스트 또는 논리 값 (true 또는 false)을 저장할 수 있습니다. 변수 값은 자유롭게 변경할 수 있지만 유형은 변경할 수 없습니다.
- 각 변수에는 고유 한 이름이 있습니다. 이 이름을 사용하여이 변수에 액세스하고 참조하십시오.
편집> 변수 정의로 이동하여 변수를 만듭니다. 나타나는 창에서 변수 이름을 입력하고 원하는 데이터 유형 (로직, 숫자 또는 텍스트)을 선택합니다. 더 이상 필요하지 않은 변수를 삭제할 수도 있습니다.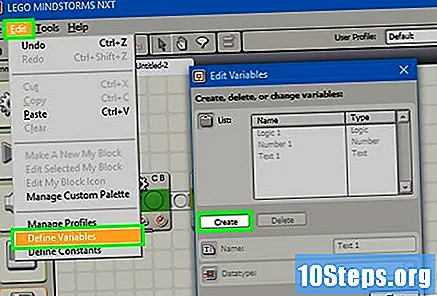
- 변수를 설명하는 이름을 지정하여 그들이 누구를 쫓고 있는지 알 수 있습니다. 로봇이 보낼 환영 메시지를 변수에 저장하려면 "text_var_1"대신 "greetings"변수를 호출하거나 그와 같이 모호한 것을 호출하십시오.
데이터 케이블을 사용하여 명령과 연결하여 프로그램에서 변수를 사용하십시오. 수학적 연산에 연결하여 변수를 결합하거나 결과를 저장합니다. 루프 또는 스위치에 연결하여 컨트롤로 사용하고 루프 또는 스위치 내부에서 수정할 수도 있습니다.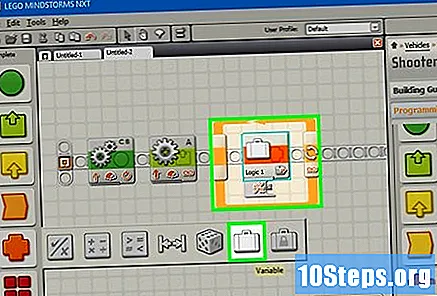
변하지 않는 변수에는 상수를 사용하십시오. 로봇 이름에 대한 텍스트 상수를 원하면 편집> 상수 정의로 이동하여 처음에 정의하십시오. 그러면 값이 변경되는지 여부에 대해 걱정하지 않고이 상수를 사용할 수 있습니다.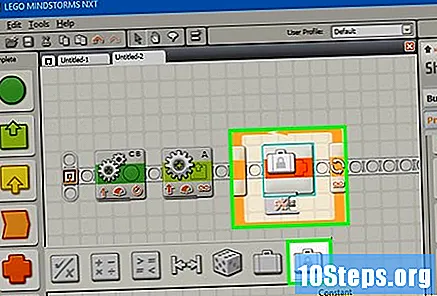
5 단계 중 5 : 사용자 지정 블록 사용
사용자 지정 블록을 이해합니다. 프로그램 중에 여러 번 반복 할 일련의 하나 이상의 작업에 대한 사용자 지정 블록을 만듭니다. 예를 들어 로봇이 3 초 동안 앞으로 이동하고 빨간색 표시등을 깜박이게하려면 이러한 지침을 사용자 지정 블록에 포함하여 프로그램에 포함해야 할 때마다 빠르고 쉽게 액세스 할 수 있도록합니다.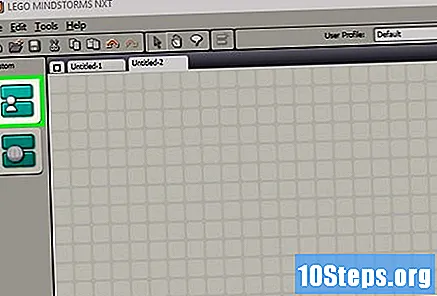
사용자 지정 블록이 될 다양한 작업을 배치합니다. 평소처럼 프로그램에 포함 시키십시오.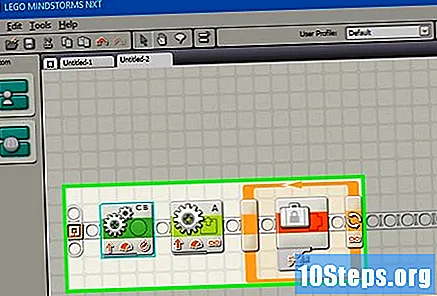
사용자 지정 블록으로 변환하려는 지침을 선택합니다. Shift 키를 누른 상태에서 각 작업을 클릭합니다. 모두 선택했으면 주석 도구 옆의 상단 도구 모음에서 등호를 클릭합니다. 그러면 "My Block Builder"라는 창이 열립니다. 편집> 새 마이 블록 만들기로 이동하여 사용자 정의 블록 빌더를 열 수도 있습니다.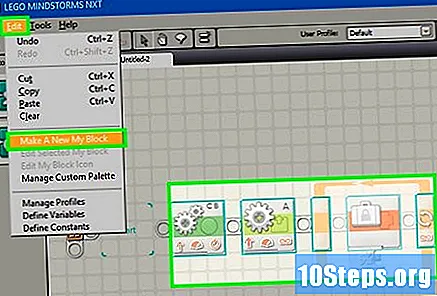
- 사용자 지정 블록을 위해 선택한 블록에 들어 오거나 나가는 데이터 케이블이있는 경우 해당 블록의 포트로 나타나고 프로그램에서 블록을 사용할 때 변수 또는 다른 데이터에 연결할 수 있습니다.
사용자 지정 블록의 이름과 설명을 입력합니다. 이름은 짧지 만 설명이 포함되어 있어야 블록이 수행하는 작업을 정확히 기억할 수 있습니다. 설명은 명확하고 상세해야하며 로봇이 바라 봐야하는 방향 또는 블록이 제대로 작동하기 위해 포트 A에 연결해야하는 항목과 같은 모든 중요한 메모를 포함해야합니다.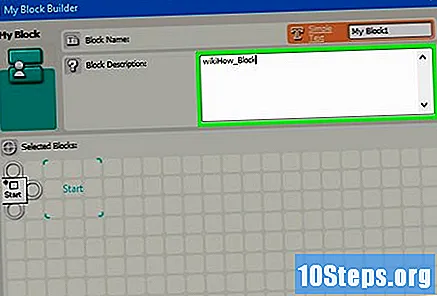
다음을 클릭하여 아이콘 편집기로 이동합니다. 원하는 아이콘을 블록 아이콘으로 드래그하십시오. 아이콘 작성이 완료되면 완료를 클릭하십시오. 프로그램에서 블록에 해당하는 단계는 방금 만든 블록으로 대체됩니다.
다른 블록을 사용하는 것과 같은 방식으로 프로그램에서 사용자 지정 블록을 사용하십시오. 프로그래밍을 더욱 쉽게하기 위해 여러 사용자 정의 블록을 결합 할 수도 있습니다. 창의력을 발휘하십시오-사용자 지정 블록을 활용하면 매우 유용 할 수 있습니다.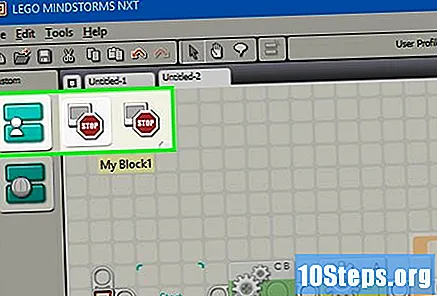
팁
- 특히 로봇을 사용하여 프로그래밍을 배우는 가장 쉬운 방법은 테스트하는 것입니다. 특정 작업이 수행하는 작업을 알고 싶다면 테스트하십시오! 배운 내용을 기록하고 나중에 프로그램에서 사용하십시오.
- 프로그램이 예상대로 작동하는지 자주 테스트하십시오.
- 더 복잡한 블록을 사용하는 방법에 대한 자세한 내용과 예제를 읽으려면 도움말 매뉴얼을 사용하는 것을 두려워하지 마십시오.


